N.º
Designation
Company Responsible
1
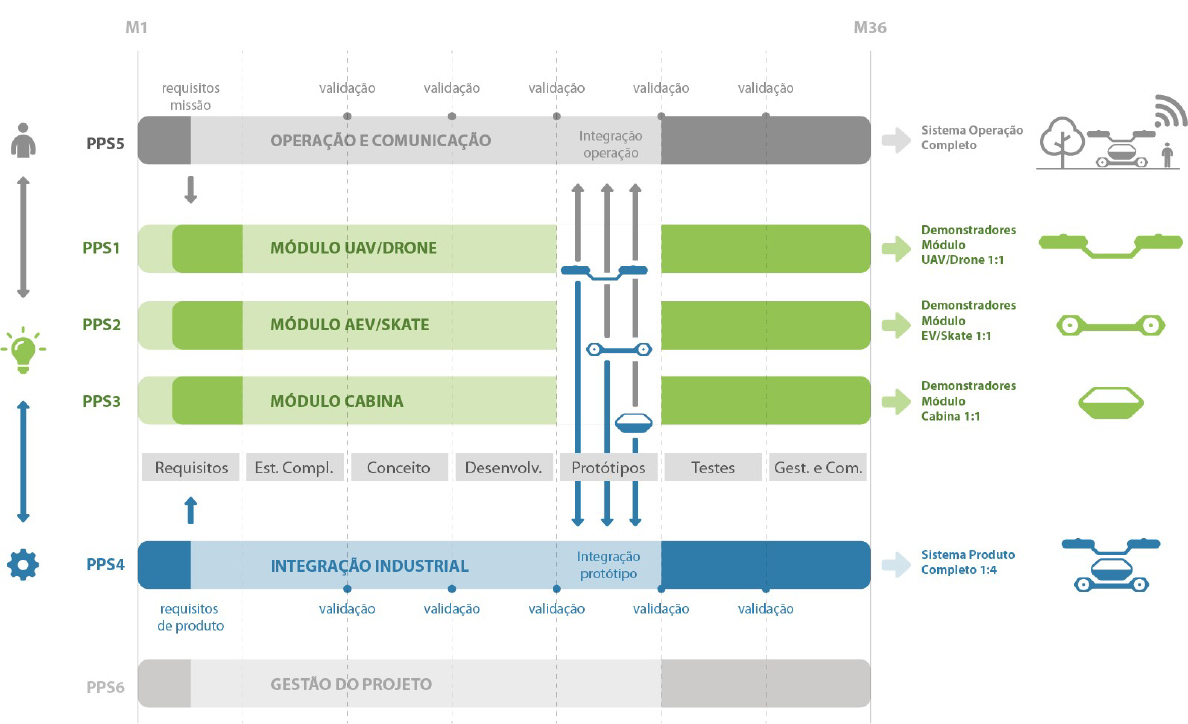
PPS 1 - DRONE Module
TEKEVER
2
PPS 2 - Skate Module
CEiiA
3
PPS 3 - Cabin Module
ALMADESIGN
4
PPS 4 - Integration of modules, development and testing of critical systems
TEKEVER
5
PPS 5 - Operation, communications and condition management
CEiiA
6
PPS 6 - Global management
AEDCP
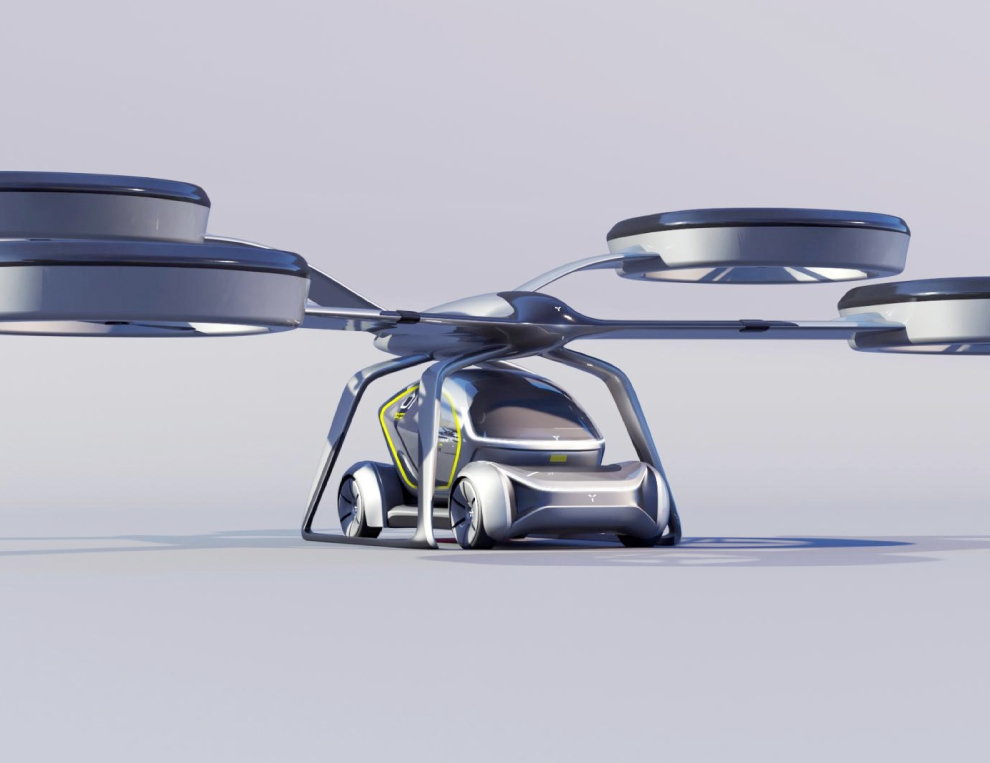
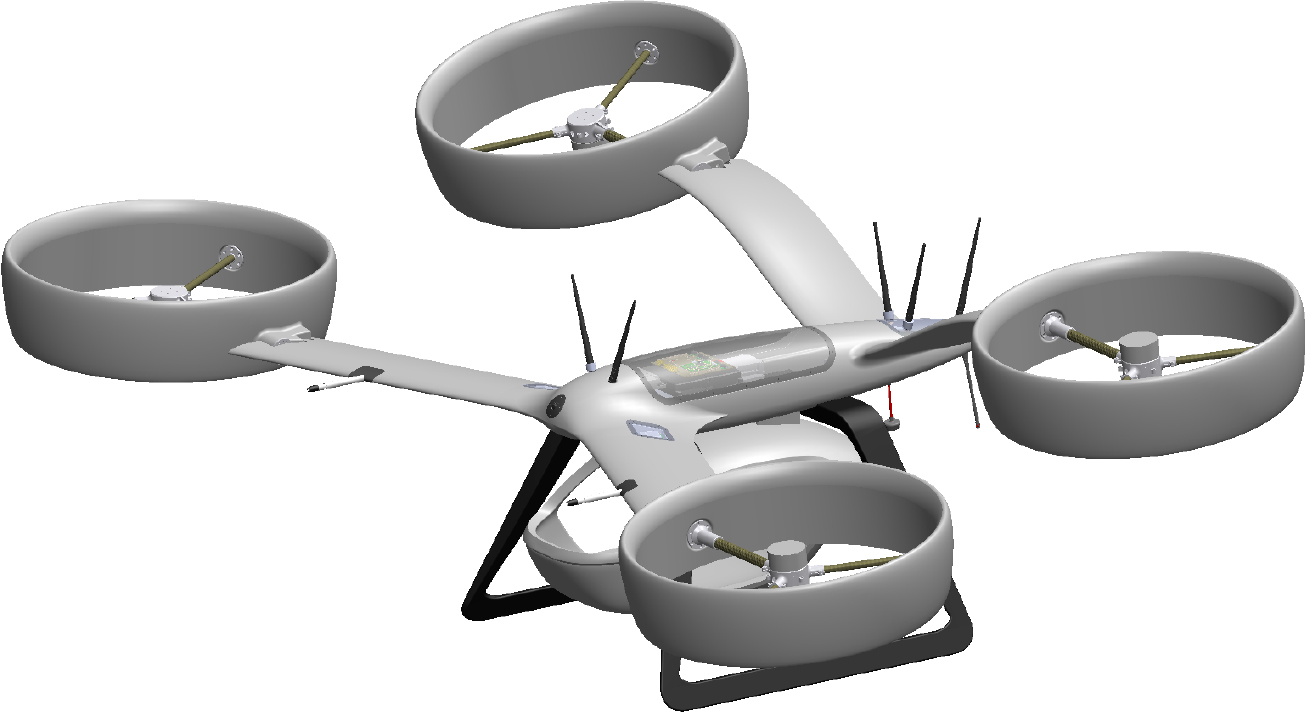
PPS1
DRONE Module is responsible for end-to-end development, i.e. study, development and prototyping of the system that will allow the FLY.PT concept to change its configuration from land vehicle mode to air vehicle mode. In this sense, it is important to emphasize the need to design a DRONE module capable of operating in two different modes, i) the mode in which only it is in the air, operating as a multicopter, remotely piloted; and ii) the way in which the DRONE module is coupled with the CABIN module and works as a transport vehicle substantially different from the previous one (in shape, mass and, inherently, flight dynamics).
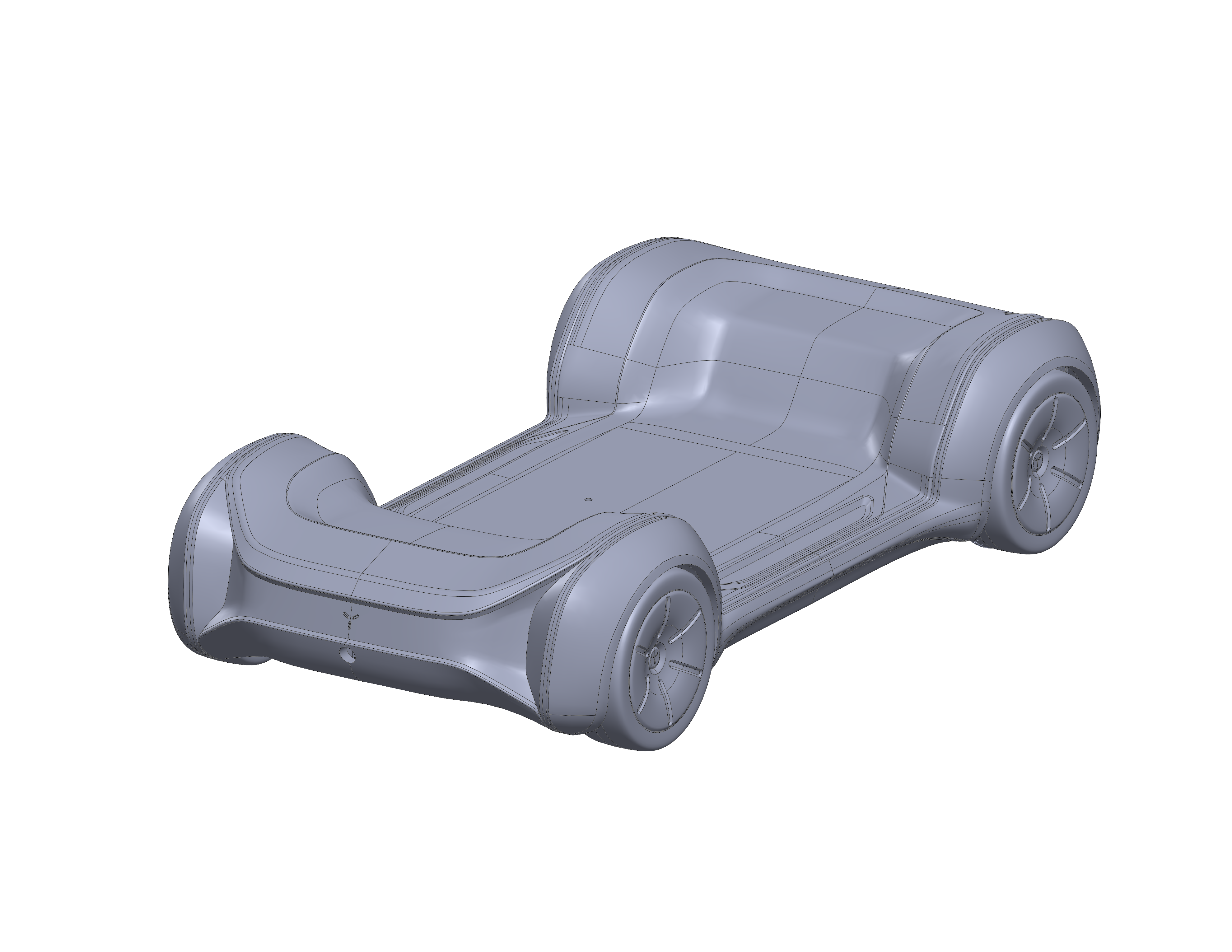
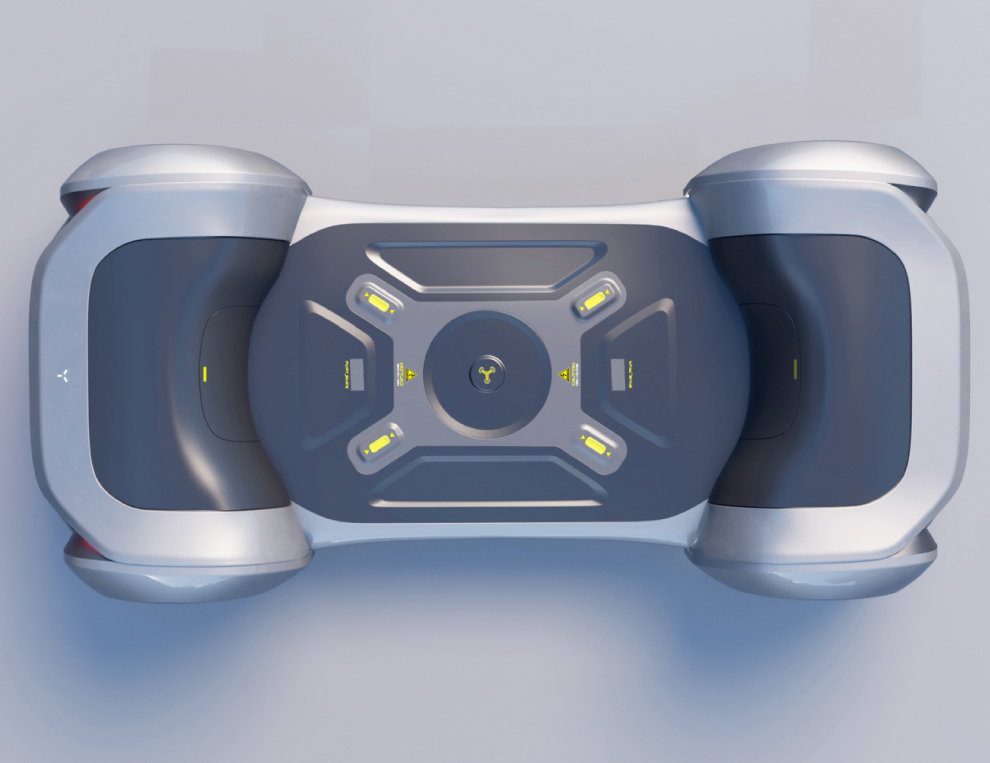
PPS2
PPS2 intends to optimize the structure of a skateboard, providing it with wide versatility in adapting to different use cases, and at low cost. To cover the different possible use cases, the premise of the development will be to divide the skateboard into independent and easy-to-assemble modules. All vehicular and autonomous functions will be integrated into the skateboard set, which can also operate without any other set connected to it (such as the PPS3, for example). There will be three main technological/scientific domains with a view to creating solutions and knowledge during this PPS. In this PPS it is intended to reach a level of technological maturity equivalent to TRL5, which allows validating a national and competitive solution with the existing state-of-the-art prototypes. The complexity and technological leverage that skateboarding represents should be considered, due to the ability to integrate different technologies and modes of operation.
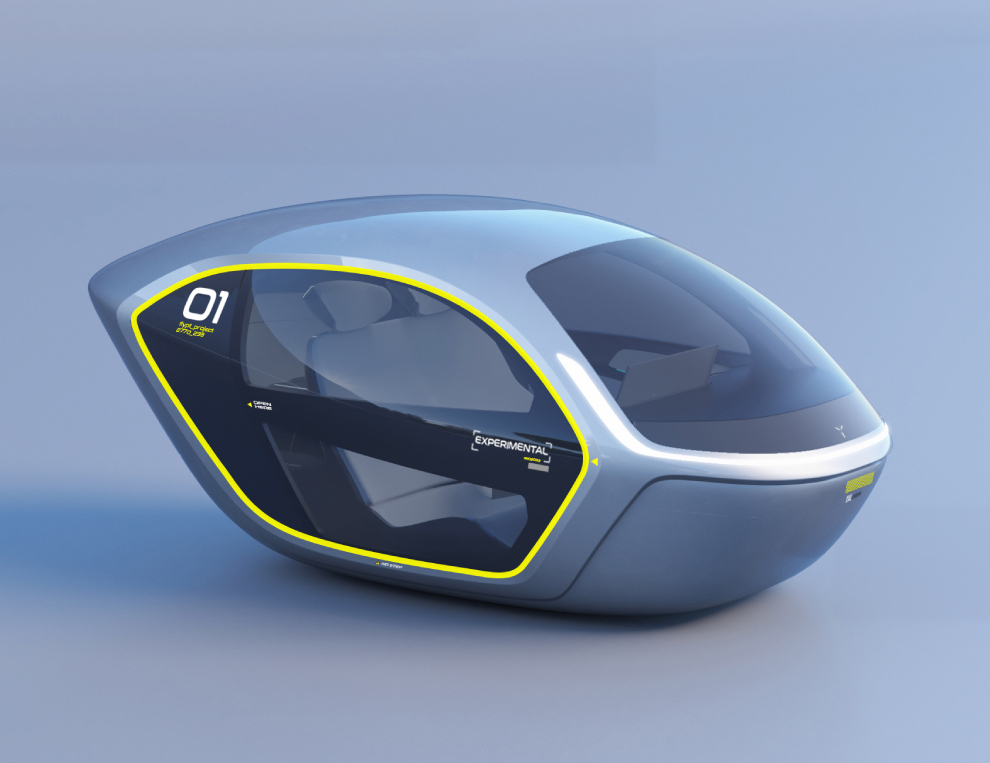
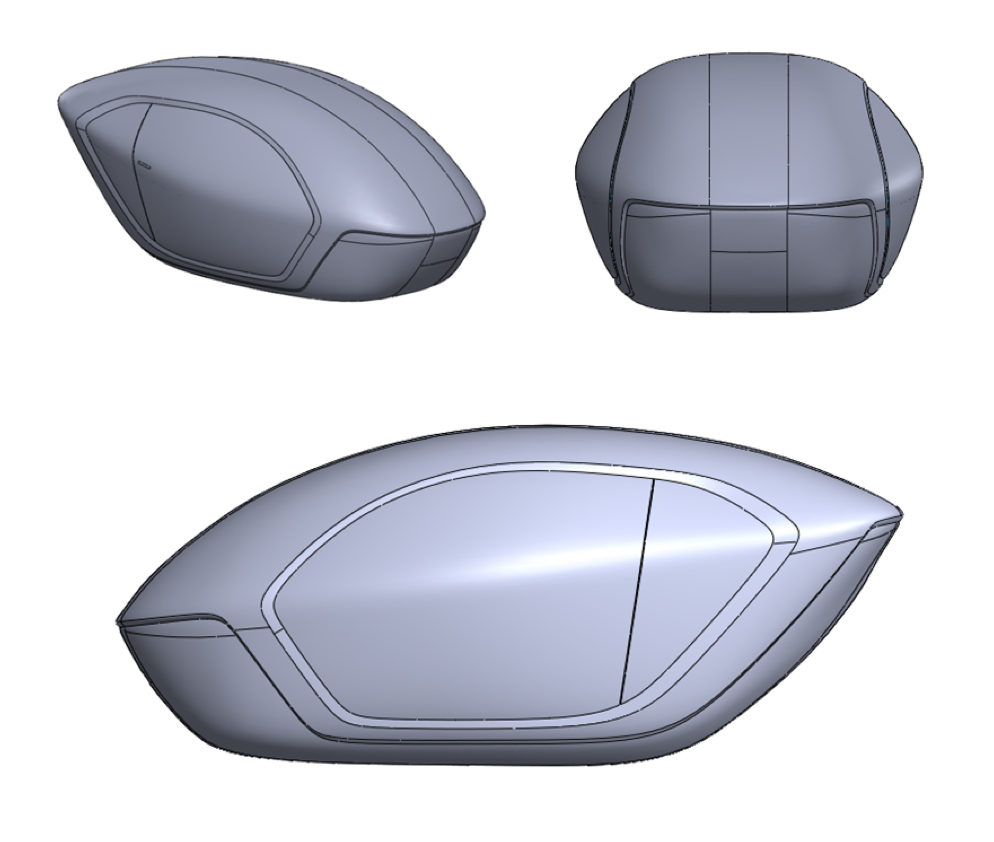
PPS3
The PPS3 is dedicated to the detailed definition of the concept of the Passenger Cabin module, focusing on design and engineering processes centered on the user, on materials and manufacturing processes, on the aerodynamic efficiency of the cabin and on the models of management and operation of the service/system , from the point of view of the user and the operation of the Cab. Thus, based on the integrated definition of requirements for the operating model (PPS5) and for the general architecture of the product concept (PPS4), PPS3 addresses the problems and new challenges of service users and operators and of the innovative technologies that enable Cabin concept. The proposed system, by creating a third dimension to urban transport, could generate new opportunities for passengers, reduce travel time, increase comfort and working time in urban travel, bringing a more efficient model and a safe travel experience.
PPS4
Main goals for PPS4
- The development, engineering, prototyping and testing of the coupling system between the cabin and the flight module, on a 1:1 scale, including the design and production of full-scale test physical means, as well as the realization and analysis of the tests.
- Integration of a 1:4 scale prototype of a vehicle derived from the 1:1 scale developments until the end of the project
- The development, engineering, prototyping and testing of control and communication systems via an “iron bird” demonstrator, at a 1:1 scale, including the design and production of full-scale test physical means, as well as the performance and analysis of the tests.
- Sustainability analysis of new products developed (Cabin, Skateboard and UAV) using Life Cycle Assessment (LCA), Life Cycle Costing (LCC) and Social Life Cycle Assessment (sLCA) as tools.
PPS5
PPS5 proposes the development of innovative scientific work in three different vectors: a communications system, a vehicle condition management system and testing/operation of the product at scale in a controlled environment. The work carried out in this PPS will allow validating the defined requirements and the urban mobility solution structured in the rest of the project, in line with the different modes of operation. With this proposal, the intention is to develop a set of communication systems that are configurable and adjustable to the module in question (whether PPS1, PPS2 and/or PPS3), always guaranteeing all security standards and the implementation of solutions that accompany the state of art.It is also intended to develop and implement a condition management system for the different modules (PPS1, PPS2 and PPS3), as well as for the vehicle as a whole, allowing real-time monitoring of its condition status, depending on its operating environment, thus making it possible to increase confidence in the respective sub-systems.

PPS6
This PPS is essential within the scope of the project, as it guarantees adequate project management as well as the monitoring of its implementation at a global level in interconnection with the PPSs, including the dissemination and enhancement of its results.
Additionally, this PPS will contribute to ensuring compliance with all the objectives and targets of the remaining PPS, on the scheduled dates. Also, this PPS constitutes an important channel of communication and efficient relationship between the promoters and between them and the intermediate body (ANI) and other partner entities. Thus, this PPS has the following main objectives:
- Ensure effective technical and financial management of the project, in accordance with established deadlines and milestones;
- Promote the project;
- Widely disseminate technical-scientific results that are not covered by intellectual property protection mechanisms;
- Valuing and exploiting all project results with potential economic and social value;
- Increase the international visibility of co-promoters;
- Promoting the involvement of society, potential recipient companies, reference users and R&D entities in the testing, validation and demonstration processes of the solutions resulting from the project;
- Promote the generation of value and knowledge;
- Accelerate technology transfer processes.